
ウォーキングとランニングの効率をさらに追求
耐衝撃時間を15 msとしました。それでは、ランニングにどのような変化が起こったのかを見てみましょう。この記事は以下の記事に対する続編です。ゆえに、「以前」と言った場合は以下の記事の内容を指しています。
- 耐衝撃時間を15 msに固定して、1.5 m/sから5.0 m/sにおいてシミュレーションを行なった。同時に、オフセットと体重移動距離の自動最適化も実現した。
- スイッチング領域は2.1 m/sから2.3 m/sへと低速度側へシフトした。
- ウォーキングからランニングへの切り替わりを示す、全体の仕事Wの変化が明確になり、また、仕事量は2割程度削減された。
シミュレーション方法
その前に、シミュレーションの方法について記載しておきます。興味の無い方は、次の節へ進んでください。
耐衝撃時間を15 msとしました。つまり、15 msの時間、着地反射筋力を発揮します。その後は、重力ランニングの原則の通り、mg/cosθの筋力を発揮します。このようにして、耐衝撃時間は固定の値となりました。したがって、速度を指定したときの自由度として動かせる変数は以下の通りとなりました。
- ストライドとピッチ
- オフセット
- 体重移動距離
ストライドとピッチは、速度を指定されているので、片方を決めればもう片方が決まりますが、両者のバランスは変更する余地があります。オフセットも極端な値でなければ、ある程度は動かすことができます。体重移動距離も同様で、0 m以上かる0.25 m以下の範囲で動かすことができます。これらの値を手動で指定しても、シミュレーションの答えは出てくるのです。しかし、これらの値の組み合わせが最も良いかどうかが判断できません。何しろ、現時点で少なくとも三次元の自由度があるからです。
そこで、コンピュータの力を借りて、計算します。その計算がシミュレーションです。これらの値を様々に変化させて、全体の仕事Wの最小となるところを探すのが最適化です。すなわち、所望の速度における最も効率の良いランニングを探ることに他なりません。
ただし、残念なことに耐衝撃時間を15 msに指定して、上記最適化を行なうことはできませんでした。計算の途中でエラーが出てしまうのです。したがって、耐衝撃時間は成り行きで計算を完了させた後、フレーム数を変更して、再度、計算を行うという煩雑な手順となりました。
原則として、1.5 m/sから5.0 m/sまで0.5 m/s置きにシミュレーションを行いました。例によって、2.0 m/sと2.5 m/sの間にスイッチング領域が存在することがわかりましたので、この間は0.1 m/s置きに行いました。この結果、シミュレーションの時間だけで多くの時間を要しましたが、何とか結果をまとめることができました。
仕事
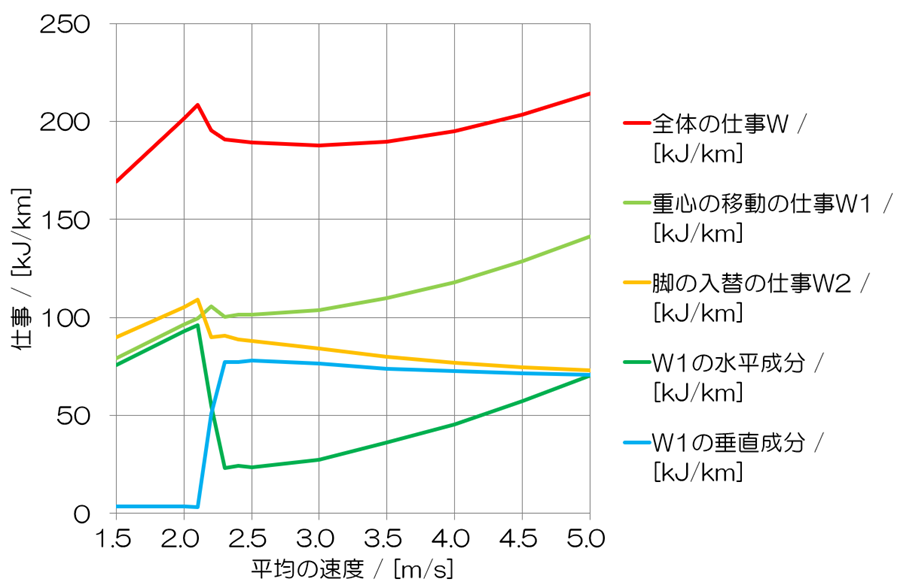
仕事から見てみましょう。平均の速度Vを増加させていくと、全体の仕事Wが2.1 m/sのところで極大値を迎えて、それから3.0 m/sで極小値を経過して、単調増加のトレンドに入ります。以前に比較して、逆S字がはっきりとしています。耐衝撃時間を組み込むことで、ウォーキングとランニングの差が顕著になったということです。
全体の仕事Wの値は、大きく低下しました。5.0 m/sにおいて以前は、260 kJ/kmでしたが、今回は214 kJ/kmです。3.0 m/s周辺の低速のランニングでも2割程度減少しています。オフセットと体重移動距離の導入によって、より効率的に走れるようになったのです。
それぞれ重心移動の仕事W1、脚の入替の仕事W2の挙動は、以前と変わりませんでした。また、スイッチング領域は2.1 m/sから2.3 m/sとなり、低速度にシフトしました。1.9 m/sのウォーキングと2.5 m/sのランニングがほぼ同じ仕事量になりますので、ランニングが可能な筋力があるのであれば、1.9 m/sから2.5 m/sへ一気にスピードアップした方が有利ということになります。
脚の運び
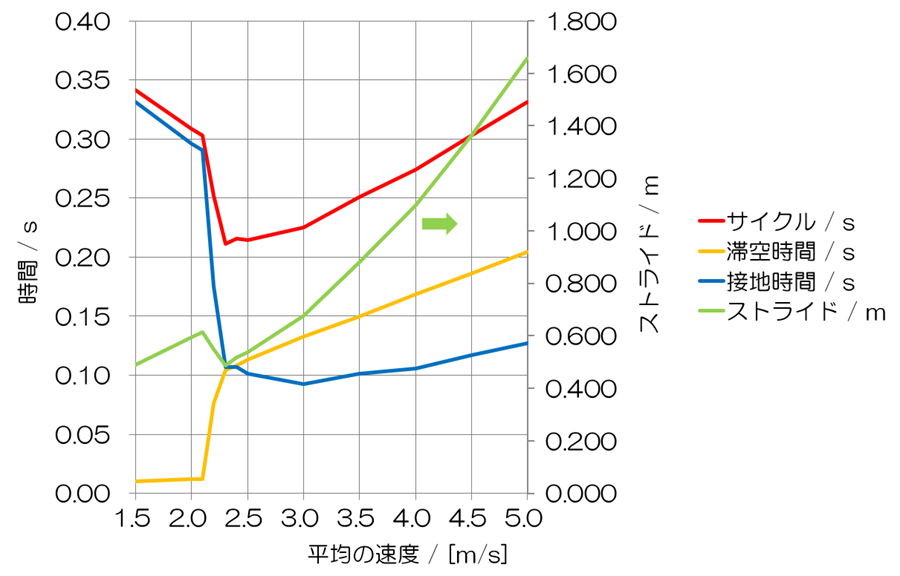
サイクルと滞空時間と接地時間をプロットしました。これらの挙動も以前と大きく変わりません。
重心の高さ
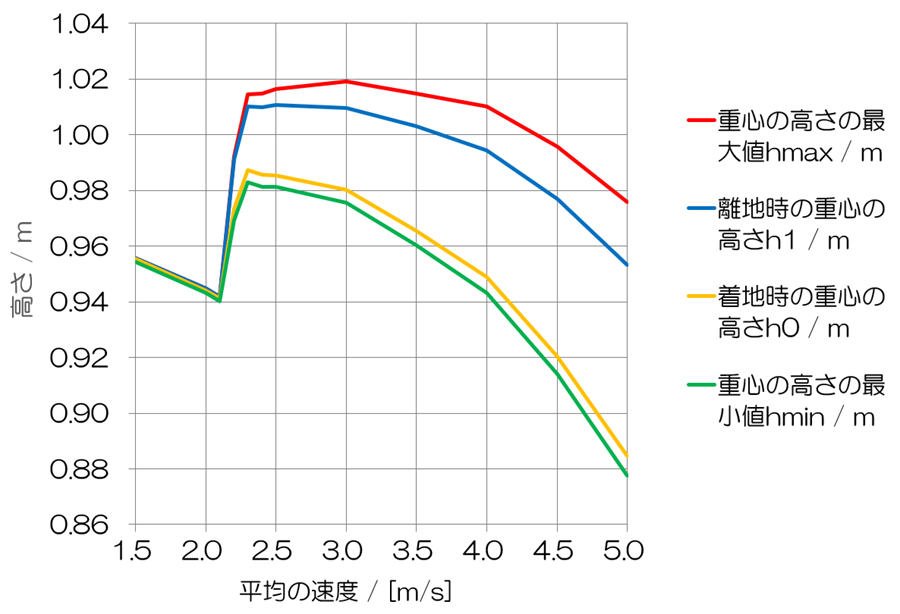
重心の高さの最小値hminを追加しました。これらを見ると、ウォーキングとランニングの根本的な違いを理解できます。2.1 m/sまでは、重心の高さの最大値hmaxと最小値hminはほぼ一致しています。2.3 m/s以降は、最大値hmaxと最小値hminが大きく乖離して、重心の上下動が始まることを示唆しています。最も効率の良いランニングであっても、滞空があるため、上下動は不可避であるのです。
着地時の重心の高さh0と最小値hminの差は、着地後の重心の低下幅を意味しています。これは2.3 m/sから5.0 m/sまで変化がありません。これは、耐衝撃時間が15 msと一定であることに由来すると考えます。最大値hmaxと離地時の重心の高さh1、着地時の重心の高さh0とh1の差が、それぞれ大きくなるのは、速度が増加するにしたがい、滞空時間が長くなるためです。
最大の仕事率、体重移動距離とオフセット
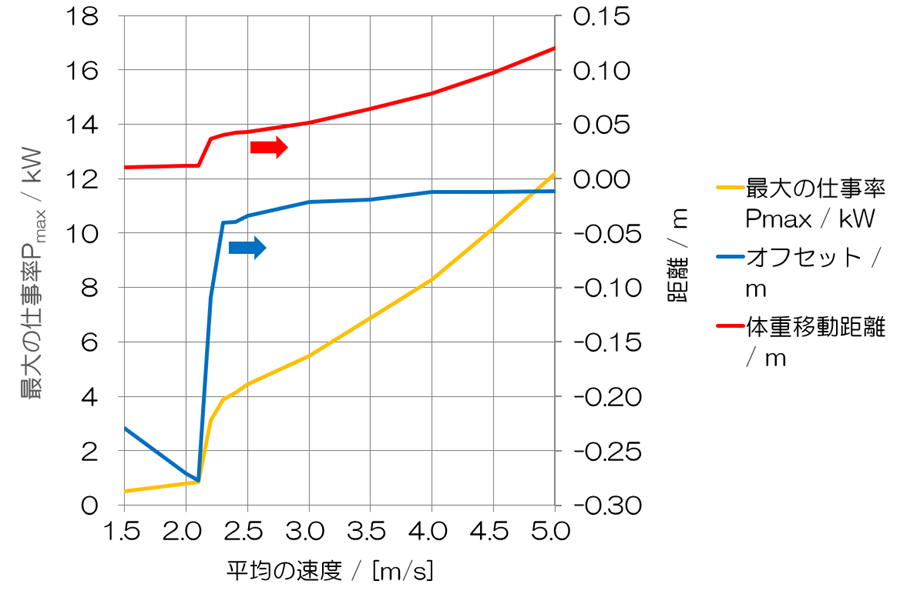
まず、最大の仕事率Pmaxです。2.1 m/sまでは1 kW未満で推移していますが、そこから、2.3 m/sにかけて突然、増加を始めます。スイッチング領域を過ぎてからはやや緩やかに増加するという傾向です。ウォーキングからランニングへの切り替えで、着地時の仕事が発生し、その後は、速度が増加するにしたがい、着地の衝撃が大きくなることを示しています。
オフセットは2.1 m/s以下の領域において速度の増加と共に拡大しています。ウォーキングにおいては、歩幅を広げて速度を稼ぐことを表しています。この点は以前と挙動が異なると言えます。
まとめ
耐衝撃時間を組み込んだ上に、15 msに固定してシミュレーションを行いました。ランニングを表象する各パラメータの、速度に対する挙動は大きく変わりませんでした。ただし、全体の仕事Wの逆S字がより明らかになりました。また、スイッチング領域が2.1 m/sと2.3 m/sという低速度側へシフトしました。
その結果、1.9 m/sのウォーキングと2.5 m/sのランニングの仕事がほぼ同じになりました。1.9 m/sから2.5 m/sの範囲においては、その速度で走る合理性がないのです。加速していくのであれば、1.9 m/sになった時点で一気に2.5 m/sまでスピードアップするのが合理的です。逆に言えば、ゆっくり走るにしても、2.5 m/sが最低なのです。長い距離を走るから力を温存したいと思っても、2.5 m/sより遅く走るのは、逆に疲れてしまうわけです。
今回の記事では、これまでに発見してきたことを再確認できたに過ぎません。しかし、2割程度の全体の仕事Wの削減が実現しました。重力ランニングでは仕事の最小化を追求していますので、自分としては、耐衝撃時間を組み込んだ点に加えて、オフセットと体重移動の組み合わせの最適点を見出せるようになったことは意味のある進歩だと考えます。
身体重心と接地点の上限値H:1.0 m体重:60 ㎏
片脚の質量:10 ㎏
耐衝撃時間:15 ms
| 平均の速度V / [m/s] | 1.5 | 2.0 | 2.1 | 2.2 | 2.3 | 2.4 | 2.5 | 3.0 | 3.5 | 4.0 | 4.5 | 5.0 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 速度の最大値Vmax / [m/s] | 1.57 | 2.08 | 2.18 | 2.25 | 2.32 | 2.43 | 2.53 | 3.03 | 3.55 | 4.07 | 4.60 | 5.13 |
| 速度の最小値Vmin / [m/s] | 1.36 | 1.85 | 1.95 | 2.13 | 2.28 | 2.38 | 2.48 | 2.97 | 3.46 | 3.94 | 4.42 | 4.89 |
| オフセット / m | -0.229 | -0.271 | -0.277 | -0.109 | -0.041 | -0.040 | -0.034 | -0.021 | -0.020 | -0.012 | -0.012 | -0.012 |
| 体重移動距離 / m | 0.011 | 0.012 | 0.012 | 0.037 | 0.040 | 0.042 | 0.043 | 0.051 | 0.064 | 0.079 | 0.097 | 0.120 |
| ストライド / m | 0.489 | 0.594 | 0.613 | 0.550 | 0.485 | 0.517 | 0.536 | 0.676 | 0.878 | 1.097 | 1.363 | 1.658 |
| サイクル / s | 0.341 | 0.308 | 0.303 | 0.252 | 0.211 | 0.215 | 0.214 | 0.225 | 0.251 | 0.274 | 0.303 | 0.331 |
| ピッチ / [歩/min] | 176 | 195 | 198 | 238 | 284 | 279 | 280 | 266 | 239 | 219 | 198 | 181 |
| 接地時間 / s | 0.331 | 0.296 | 0.291 | 0.176 | 0.107 | 0.107 | 0.101 | 0.092 | 0.101 | 0.106 | 0.117 | 0.127 |
| 滞空時間 / s | 0.010 | 0.012 | 0.012 | 0.076 | 0.104 | 0.108 | 0.113 | 0.133 | 0.150 | 0.169 | 0.186 | 0.204 |
| 重心の高さの最大値hmax / m | 0.956 | 0.945 | 0.942 | 0.992 | 1.014 | 1.015 | 1.016 | 1.019 | 1.015 | 1.010 | 0.996 | 0.976 |
| 離地時の重心の高さh1 / m | 0.956 | 0.945 | 0.942 | 0.991 | 1.010 | 1.010 | 1.011 | 1.010 | 1.003 | 0.994 | 0.977 | 0.953 |
| 着地時の重心の高さh0 / m | 0.955 | 0.944 | 0.941 | 0.973 | 0.987 | 0.986 | 0.985 | 0.980 | 0.965 | 0.949 | 0.920 | 0.885 |
| 重心の高さの最小値hmin / m | 0.954 | 0.943 | 0.940 | 0.969 | 0.983 | 0.981 | 0.981 | 0.976 | 0.960 | 0.943 | 0.914 | 0.878 |
| W1の水平成分 / [kJ/km] | 75.66 | 92.87 | 96.06 | 54.96 | 23.08 | 24.14 | 23.41 | 27.28 | 36.00 | 45.36 | 57.19 | 70.41 |
| W1の垂直成分 / [kJ/km] | 3.56 | 3.52 | 3.35 | 50.57 | 77.22 | 77.07 | 77.84 | 76.32 | 73.72 | 72.70 | 71.45 | 70.73 |
| 重心の移動の仕事W1 / [kJ/km] | 79.23 | 96.39 | 99.41 | 105.54 | 100.30 | 101.21 | 101.25 | 103.60 | 109.73 | 118.06 | 128.64 | 141.13 |
| 脚の入替の仕事W2 / [kJ/km] | 89.92 | 105.11 | 109.07 | 89.99 | 90.59 | 88.72 | 88.10 | 84.13 | 79.85 | 76.98 | 74.70 | 72.92 |
| 全体の仕事W / [kJ/km] | 169.14 | 201.50 | 208.48 | 195.52 | 190.89 | 189.94 | 189.35 | 187.73 | 189.58 | 195.04 | 203.34 | 214.05 |
| 最大の仕事率Pmax / kW | 0.51 | 0.81 | 0.86 | 3.10 | 3.88 | 4.13 | 4.43 | 5.48 | 6.88 | 8.30 | 10.19 | 12.18 |


“ウォーキングとランニングの効率をさらに追求” に対して2件のコメントがあります。