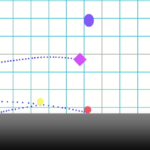
2024年7月21日 / 最終更新日時 : 2025年1月4日 つくばのしろうさぎ 理論ウォーキング vs ランニング:速度と動きの違いをアニメーションで解説! 前回の記事では、速いウォーキングよりも遅いランニングの方が楽という領域があることを示しました。しかし、グラフと数字だけでは感覚的にわからないと思います。私自身も、グラフと数字が意味していることは一体どんな感じなのかはわか […]
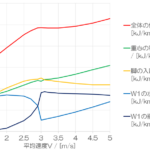
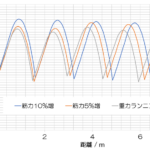
2024年7月15日 / 最終更新日時 : 2025年2月24日 つくばのしろうさぎ 理論世界初!歩くよりも走る方が楽な速度領域の存在を証明 今回は、1.5 m/sから5 m/sまでの速度において全体の仕事Wが最小化されるように、パラメータを最適化してみました。より具体的には、離地時の身体の傾きθ2と滞空時間とオフセットを調整していきました。 仕事 まずは、仕 […]
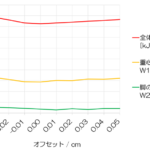
2024年7月11日 / 最終更新日時 : 2025年1月4日 つくばのしろうさぎ 理論前方着地の否定をさらに否定する!低速への理論の拡張 着地は身体重心の直下が最適であることがわかりました。しかし、まだまだ解決するべき課題があります。その1つがウォーキングとランニングの統合です。 ウォーキングとランニングの区別 世の中にはランニング本の他にウォーキング本が […]
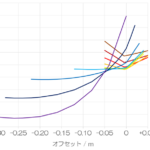
2024年6月30日 / 最終更新日時 : 2025年2月24日 つくばのしろうさぎ 理論着地は身体重心の直下で良いのか?ランナーの疑問を解消 おおよそ重力ランニングの理論が完成に近づいてきたという状況です。しかし、私自身、走りながら疑問に思っていることがあります。それは着地の位置です。これまでのシミュレーションではこの点を議論せず、常に重心の直下としてきました […]
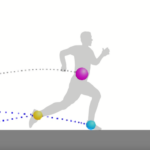
2024年6月23日 / 最終更新日時 : 2025年1月4日 つくばのしろうさぎ 理論百聞は一見に如かず:重力ランニングの正しさをアニメーションで実感 1サイクルで完結するシミュレーションを、速度を変えて実施しました。その結果、このシミュレーション方法は一定の検証を経たと考えています。しかし、このシミュレーションの結果、現れて来たものが具体的にどんなランニングであるかは […]
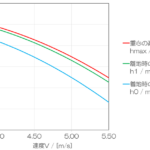
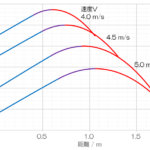
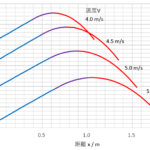
2024年6月16日 / 最終更新日時 : 2025年6月16日 つくばのしろうさぎ 理論速度を上げてもピッチが変化しないのは本当だった!物理が明らかにした真実 前回は、1サイクルで完結するシミュレーションを実施しました。そのときは、4.0、4.5、5.0、5.5 m/sの値を示しました。このときは、離地時の身体の傾きθ2は整数となっていました。実は、θ2の値は整数の値を順に入力 […]
2024年6月1日 / 最終更新日時 : 2025年1月4日 つくばのしろうさぎ 理論完全定常状態のシミュレーションで見えた本当の最適化 筋肉走りのモデル化の過程において、重力走りのモデルを見直すことになったというのは以下の記事で既に報告した通りです。 また、その後、筋肉走りのモデル化においては、重力ランニングと筋肉走りの身体重心の上下動をグラフで表現して […]
2024年5月26日 / 最終更新日時 : 2025年2月24日 つくばのしろうさぎ 理論「筋肉走り」のモデル化:重力ランニングからのアプローチ さて、当初の目標であった筋肉走りのモデル化に取り掛かります。重力ランニングのモデル化が前回で完了しました。これは、所定の速度において、仕事量を最小化したことを意味します。ここから、何かしらの無駄を追加していくわけです。 […]
2024年5月12日 / 最終更新日時 : 2025年1月4日 つくばのしろうさぎ 理論物理モデルの再構築:重力ランニングと筋力走りの統合的理解に向けて 筋肉走りのモデル化における困難 筋肉走りと重力ランニングの比較を行おうとしました。筋肉走りの物理モデルを作成して、重力ランニングのそれと比較しようとしました。ところが、筋肉走りの物理モデルの作成は難しいということがわかり […]
2024年3月31日 / 最終更新日時 : 2025年5月11日 つくばのしろうさぎ 理論脚の質量の影響:ランナーの脚は細い方がいいのか? 重力ランニングにおいて、最適点が存在すること、および、最適点の付近であれば、およそ効率的なランニングと言えることがわかりました。 もう1つ確認しておきたいことがあります。それは、脚の質量によって最適点がどのように変わるか […]