滞空はピッチを抑えるが速度を落とす?ランニングの際の滞空の効果と課題
滞空はピッチを抑えるために仕方なく導入することを確認しました。
では、滞空を挟むことでどれほどピッチが抑えられるのかという点が気になります。また、言うまでもないことですが、滞空中は重心が自然落下します。このため、滞空時間には必ず限界があります。
まずは、滞空により現実的な数値までピッチを減少させられるかを見てみましょう。前回の記事では、1キロ4分53秒のゆっくりとした速度でありながら、ピッチが545歩/minとなっており、やはり、両脚の入れ替えの間に滞空を挟まないことが非現実的であることが示されていました。
そこで、身体の傾きが20°になった後に一定時間0.2秒の滞空を挟みます。滞空中は脚が離地していますから、重力の変換による推進力は働きません。しかし、走行抵抗については変わらず発生します。つまり、滞空中は加速しないだけでなく、減速します。また、接地中は重心の高さhは一定になるように追加の筋力を発揮するという条件でしたが、滞空中は時間の二乗に比例して重心が落下していきます。
- 滞空を導入することでピッチを抑えることができたが、その効果には限界がある。
- 滞空中は加速せず、減速し、重心を持ち上げるために筋力を追加で消費する。
- この結果、平衡速度が低下し、ランニングエコノミーに悪影響を与えることが明らかとなった。したがって、滞空区間はできるだけ短くすべきである。
スタート時
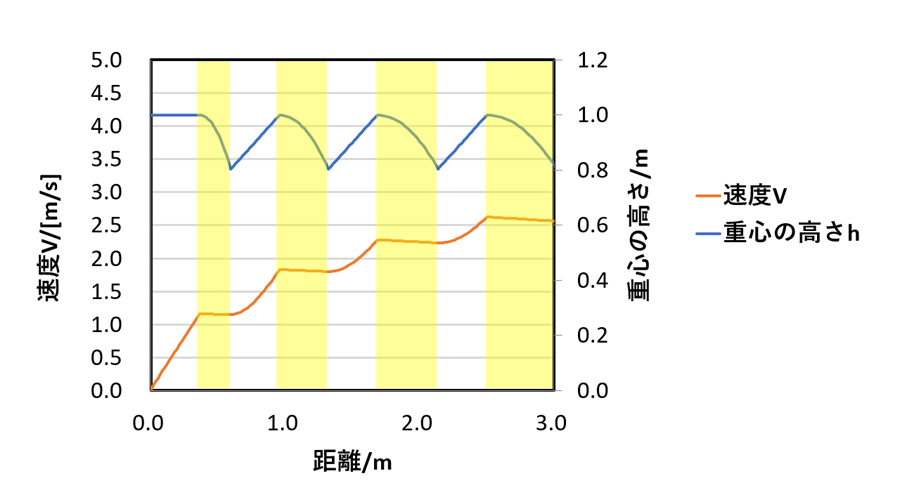
まずは、最初の2歩について、重心の高さと速度の変化を詳細に見てみましょう。以下にグラフを示しました。ただし、接地区間における重心の高さhの上昇は、単純に必要な上昇分を直線的に割り振っただけであり、着地時と離地時の挙動については考慮されていません。この点については後続の検証において組み込む予定です。
重心の高さ
最初の1歩では、重心の高さhは1mのまま推移します。身体を0°から20°まで傾けた後に、最初の滞空を実施します。滞空区間は黄色に着色してあります。滞空中は重心が自由落下し、着地したときには81cmの高さまで低下しています。
着地後は2歩目です。再び、身体を0°から20°まで傾けていきますが、それだけでは足りません。その間に重心を1mまで持ち上げなければなりません。重心を持ち上げる力は接地区間で均等に発揮することにしました。これは負荷分散の原則に則った設定です。重心を持ち上げるだけならば、垂直方向上向きに力をかければ良いのですが、重心作用線の原則により、筋力の作用線は、接地点と重心を通らなければなりません。つまり、身体の傾きθの方向上向きになるのです。
よって、持ち上げる速度をVyとすると、垂直方向にmgVy、水平方向にmgVy・tanθの仕事率をさらに追加の筋力で発揮することになります。滞空を挟むことにより、筋力の仕事が増えたということです。この分の仕事については別記事で議論する予定です。
速度
1歩目は身体の傾きθの増加と共に推進力が大きくなり、速度が増加します(左端の白色の区間)。しかし、滞空区間(黄色の区間)に入ると、速度の増加は停止します。これは脚が地面から離れるためです。このように、脚を地面から離すと重力を利用できなくなるのです。それどころか、滞空中は空気抵抗によって、速度が低下します。接地区間は加速区間であり、滞空区間は減速区間なのです。それでも、空気抵抗は小さいため、着地して2歩目を開始すると速度が再び増加していきます。
巡航時
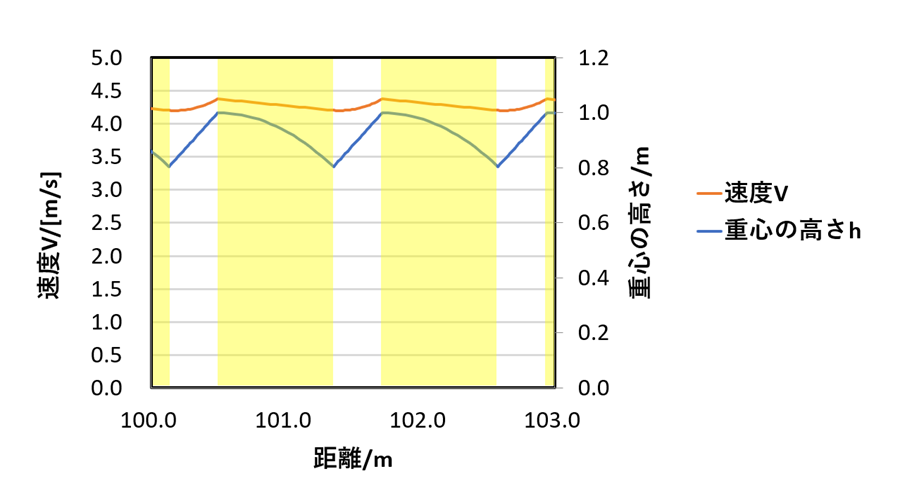
こうして加速していった後、100m進んだところのグラフを以下に示します。スタート時と比較してどうなっているでしょうか。
重心の高さ
滞空時間は、スタート時と変わらず0.2秒であるため、滞空中に1mから81cmまで重心の高さが減少するというサイクルにも変わりはありません。ただし、速度が大きくなったため、滞空距離(黄色区間の幅)は長くなっています。
接地区間において回復させる重心の高さも81cmから1mと変わりません。しかし、速度が大きくなったことにより、接地時間が約0.08秒と短くなります。つまり、この短い時間に、重心を持ち上げないといけないのです。その仕事率は接地時間に反比例して大きくなります。滞空を挟むことにより、追加された仕事を、速度が大きくなることにより、さらに短い時間で発揮しなければならなくなったわけです。これが走行速度Vを維持することの負荷です。
速度
走行抵抗と釣り合った状態となり、4.2m/sから4.4m/sの範囲で変動していますが、滞空区間に入った瞬間が最も大きく、着地した瞬間が最も小さいです。前後の歩数でも、この変動の範囲は一定ですので、平衡速度に達していると言えます。
ピッチの抑制
ランニングを通して見てみましょう。
身体の傾きθの範囲:0°から20°重心の高さhの初期値:1 m
| 歩数 | 走行距離l/m | 運動エネルギーK/J | 速度V/[min/km] | 経過時間/s | ピッチ/[歩/min] |
|---|---|---|---|---|---|
| 0 | 0 | 0 | 0 | 0 | n/a |
| 1 | 0.6 | 40 | 14:30 | 1.19 | 50 |
| 2 | 1.3 | 97 | 09:16 | 1.65 | 130 |
| 3 | 2.1 | 150 | 07:28 | 2.04 | 156 |
| 4 | 3.0 | 197 | 06:30 | 2.39 | 170 |
| 5 | 4.0 | 239 | 05:54 | 2.73 | 179 |
| 6 | 4.9 | 277 | 05:29 | 3.05 | 185 |
| 7 | 6.0 | 311 | 05:11 | 3.37 | 190 |
| 8 | 7.0 | 340 | 04:57 | 3.68 | 193 |
| 9 | 8.1 | 366 | 04:46 | 3.98 | 196 |
| 10 | 9.2 | 388 | 04:38 | 4.29 | 199 |
| 20 | 20.8 | 499 | 04:05 | 7.21 | 208 |
| 30 | 32.9 | 524 | 03:59 | 10.08 | 210 |
| 40 | 45.1 | 529 | 03:58 | 12.94 | 210 |
| 50 | 57.3 | 530 | 03:58 | 15.80 | 210 |
| 100 | 118.5 | 530 | 03:58 | 30.07 | 210 |
ピッチは、走行抵抗と釣り合った状態において、210歩/minとなりました。かなり高い値ですが、現実的な数字です。このとき、1キロ3分58秒ですから、これも現実的にあり得る数字です。
このように、0.2秒の滞空を挟むことにより、ピッチを現実的な範囲に抑制することができました。しかし、このときの速度が1キロ3分58秒ですから、まだまだエリートランナーのスピードには及びません。滞空という減速区間を挟むことにより、接地時の加速との平衡が、速度の小さい方に移動したためです。
滞空を挟むことにより、重心を持ち上げる作業が発生し、追加で筋力を消費するようになっています。それにもかかわらず、平衡速度は低下しました。ピッチを抑えるために止む無く導入した滞空ですが、ランニングエコノミーの観点からは、明らかにネガティブな効果をもたらしました。この点から、滞空区間はできるだけ短くするべきという方向性が見えてきました。