
目に見えない力を見える化すると何が見える?
アニメーションを作り、重心と接地点の動きを表現しました。その後、ランニングの解説をしようと考えたときに、シミュレーションを作った本人以外には、伝わっていないものがあることに気が付きました。それは、力の作用です。力の大きさと向きを言葉では説明して来ましたが、アニメーションには含めていませんでした。今回は、アニメーションを改修して、力を書き加えてみました。
- 地面反力をアニメーション上に表現することで、重力ランニングがより理解しやすくなった。重力ランニングの本質がより明確化された。
- ランニング時の着地点は身体重心の直下であるため、着地反射筋力により減速しない。
- 離地の直前に地面反力は大きくならない。滞空は身体重心の慣性に従い、足を地面から離しているに過ぎない。
アニメーション
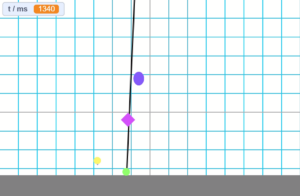
重力ランニングにおいて、力は全て重心に作用します。シミュレーションに含まれる力は3種類しかありません。重力と筋力と空気抵抗です。今回、書き加えたのは筋力の反作用である地面反力です。地面反力は、接地点と重心を結ぶ直線を作用線とし、地面から重心の向きに作用します。言うまでもなく、地面反力は、どちらかの脚が接地しているときにのみ生じますので、アニメーション上もそのようになっています。地面反力を黒い線で表しています。線の長さは力の大きさを表しています。
では、速度の小さい方から見ていきます。
1.5 m/s
着地の瞬間は、足が重心よりも前方に位置しているため、地面反力はやや後方に向かっています。つまり、ブレーキとなっています。この明らかなブレーキ時間の存在がウォーキングの特徴です。また、着地の一瞬だけ線の長さが長くなっています。これが15 msの耐衝撃時間における着地反射筋力の大きさを示しています。
2.1 m/s
スイッチング領域の直前です。ウォーキングの特徴をそのまま残しています。速度が上がり、その分だけ、黒線の長さが長くなっています。
2.3 m/s
スイッチング領域を経過し、ランニングに移行しています。着地の瞬間の着地反射筋力を表す黒線が格段に長くなり、重心を貫通するようになります。その一瞬だけ、何倍にも黒線が伸び、その後は、ウォーキングのときとほぼ同じに戻ります。つまり、着地が終わった後の筋力はウォーキングとランニングでそれほど変わらないのです。離地の瞬間まで、線の長さが大きく変わらない点にも着目してください。地面を蹴って走ると思っている人には違和感がある部分です。地面を蹴ることによって滞空が始まるわけではなく、重心の慣性に従い、足を地面から離しているだけなのです。
3.0 m/s
着地反射筋力がおおきくなり、画面からはみ出してしまいます。やっとランニングらしい速度となっており、着地反射筋力が後ろ向きの瞬間が存在しません。つまり、着地の瞬間にブレーキをかけていないのです。筋力の全てを重心の高さの回復および前進に使っているという、最適化されたランニングであることがわかります。(2.3 m/sでは、一瞬だけ着地反射筋力が後ろに傾いていました。)
4.0 m/s
ランニングの特徴は変わりません。速度を増加させても、着地後の筋力は変わらないというのが興味深いです。逆に言えば、着地反射筋力の負担は増す一方です。
5.0 m/s
ストライドが大きくなるので、接地区間の後半で地面反力の作用線の傾きが大きくなります。しかし、傾向は変わりません。脚を前方へ送っても、実際に着地するところは、重心の真下であることが、着地の瞬間の黒線からわかります。
まとめ
地面反力をアニメーション上で表現することにより、重力ランニングの仕組みが理解しやすくなったように感じます。重力ランニングの本質である以下の2点がより明確化されました。
- ランニングにおいては着地点は重心の直下である。このため、着地反射筋力によりブレーキは掛からない。
- 滞空の直前にも地面反力は大きくならない。滞空は重心の慣性のままに、足を地面から離しているに過ぎない。
“目に見えない力を見える化すると何が見える?” に対して1件のコメントがあります。