遂に到達!速度と仕事の関係から導く、ランニングの最大効率
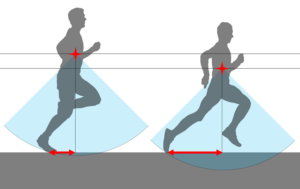
前の記事では、離地の瞬間の身体の傾きθ2を大きくしていくことで、速度Vが増加し、ストライドが拡大し、ピッチが減少することがわかりました。また、滞空時間を0.20 sから0.16 sへ短縮することで、ランニングの全体の仕事Wが減少することがわかりました。一方で、θ2を大きくしていく過程で全体の仕事Wが極小値を取ることもわかりました。
これらを箇条書きにまとめると以下のようになります。
- θ2を大きくする × 滞空時間一定だと、a)速度Vが大きくなり、b)ストライドが大きくなり、c)ピッチは減少し、d)全体の仕事Wは極小値を迎えた。
- 滞空時間を短くする × θ2一定だと、a)速度Vが大きくなり、b)ストライドは小さくなり、c)ピッチは増加し、d)全体の仕事Wは減少した。
ここから導きだせるのは、以下の事柄です。
- 所定の速度でランニングするときに、θ2と滞空時間は固定ではなく、それらのバランスには一定の自由度がある。逆言えば、速度Vを決めても、θ2と滞空時間は決まらない。
- θ2とストライドには強い相関性がある。ストライド走法とはθ2を大きくすることで速度Vを増加させる走法である。
- 滞空時間とピッチには強い相関性がある。ピッチ走法とは滞空時間を短くすることで速度Vを増加させる走法である。
θ2を大きくしても、滞空時間を短くしても、ともに速度Vを増加することが示されたことで、これまで何故、ストライド走法とピッチ走法の両方が存在し、決着がつかなかったのかが明確に示されました。しかし、両者の関係を紐解くことで、この議論にも終止符を打つことができます。
- θ2と滞空時間の組み合わせに対して、速度V、全体の仕事W、ストライドとピッチがどのように変化するかを示した。
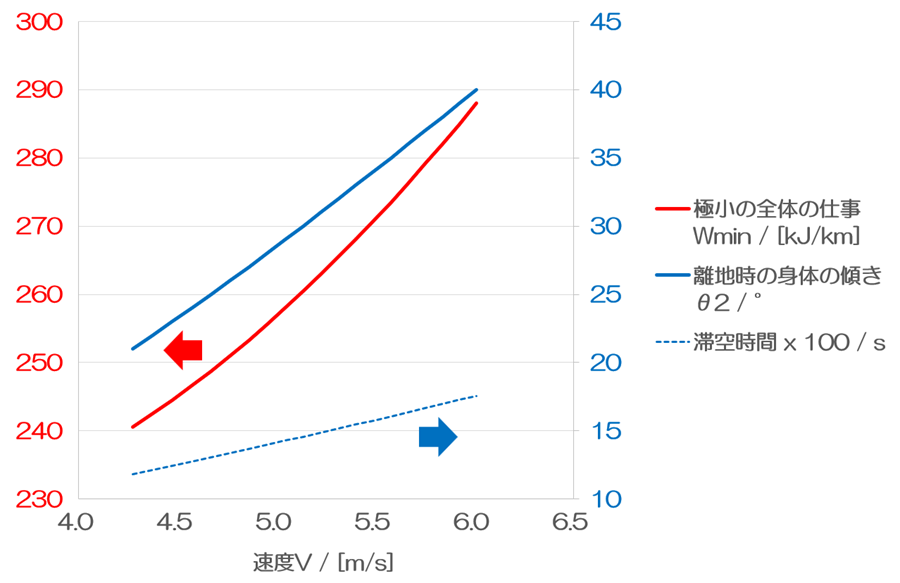
- 所定の速度Vにおいて極小となる全体の仕事Wminを求めた。これにより、速度Vを増加させるためには、θ2を増加させ、滞空時間は延長させることがわかった。このとき、ストライドは大きくなり、ピッチは減少する。
θ2と滞空時間の組み合わせには自由度がある
そこで、θ2と滞空時間の組み合わせに対して、速度V、ストライド、ピッチ、全体の仕事Wがどのように変化していくかを見てみましょう。θ2を21°から40°と滞空時間を0.11 sから0.21 sまで、それぞれ変化させて、三次元のグラフを作成しました。
速度V
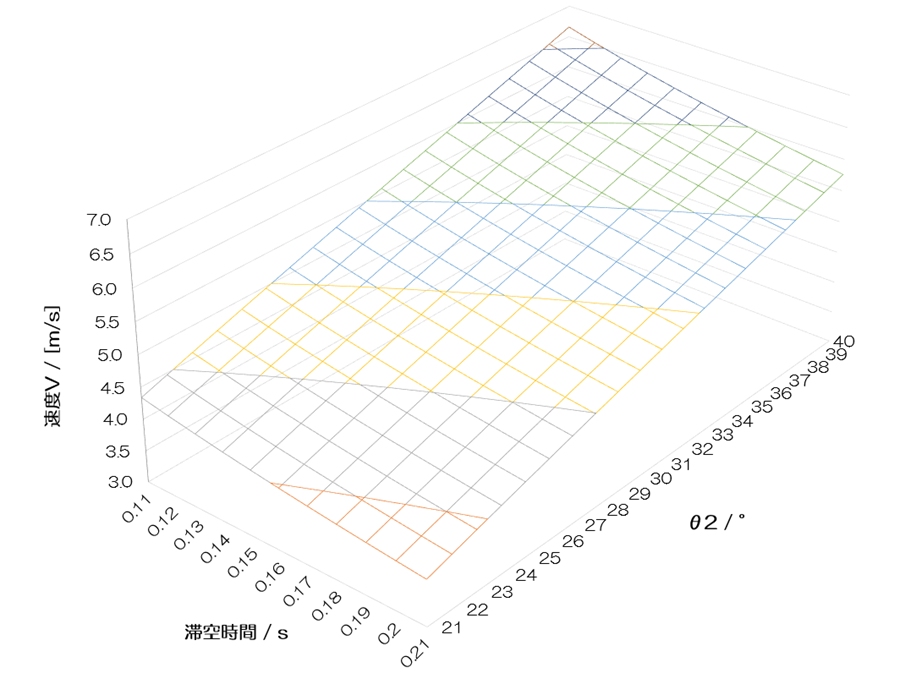
まず、速度Vのグラフです。平面であるように見えます。つまり、θ2を増加させても線形に速度Vが増加し、滞空時間を短くしても速度Vが線形に増加することを示しています。滞空時間を短くすると速度Vが増加する、という結論は直感に反するかもしれません。
ストライド
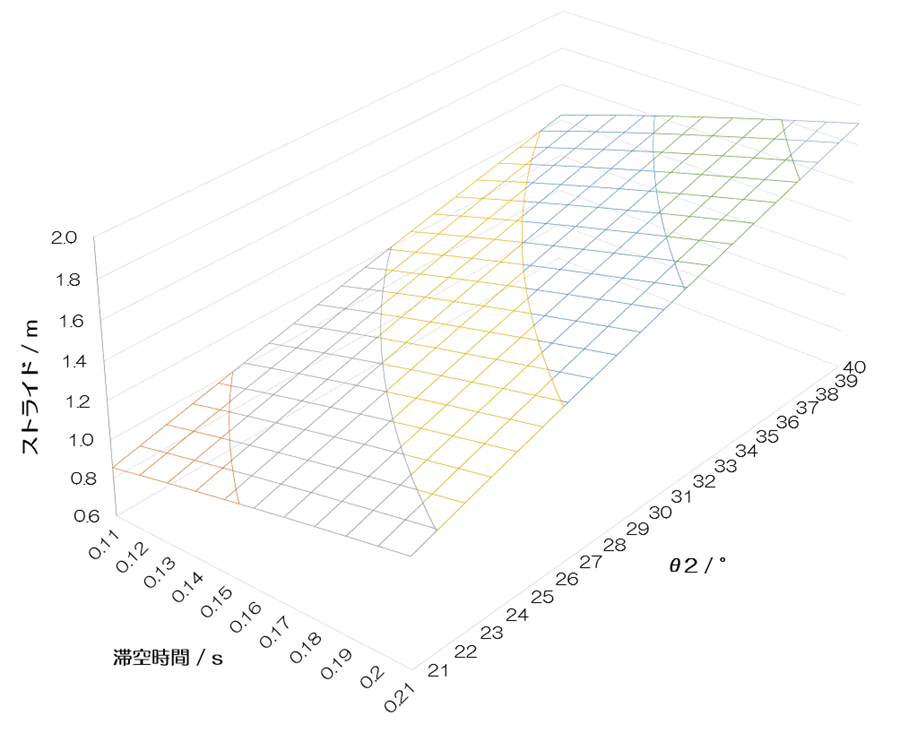
次にストライドのグラフを見てみましょう。θ2が増加すると、ストライドが増加します。離地の瞬間における身体の傾きがθ2ですから、これは意外ではありません。滞空時間が短縮すると、ストライドは減少しています。滞空時間が短縮すれば、滞空時に進む距離が減少しますから、ストライドが減少するのは当然です。
ピッチ
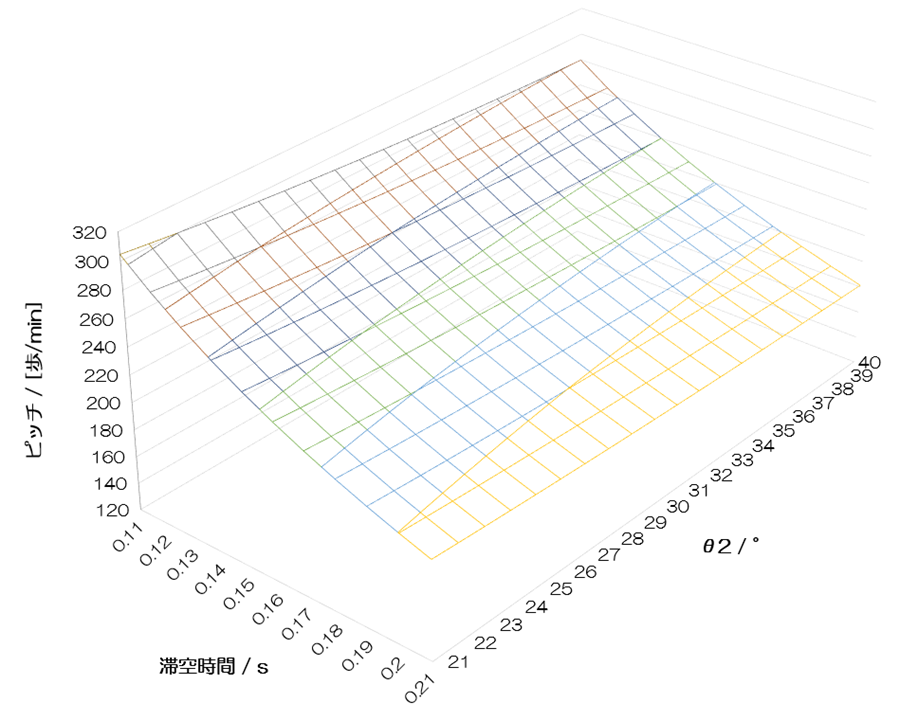
ピッチはどのように変化するでしょうか。これまで既に示されていたように、滞空時間を短縮すると、ピッチは明らかに増加します。240歩/minを超えた領域は現実的ではないと考えます。この辺りが、全体の仕事Wのグラフにどう表れてくるかに注目です。一方、θ2との相関性は小さいですが、θ2を増加させると、ピッチは緩やかに減少します。
全体の仕事W
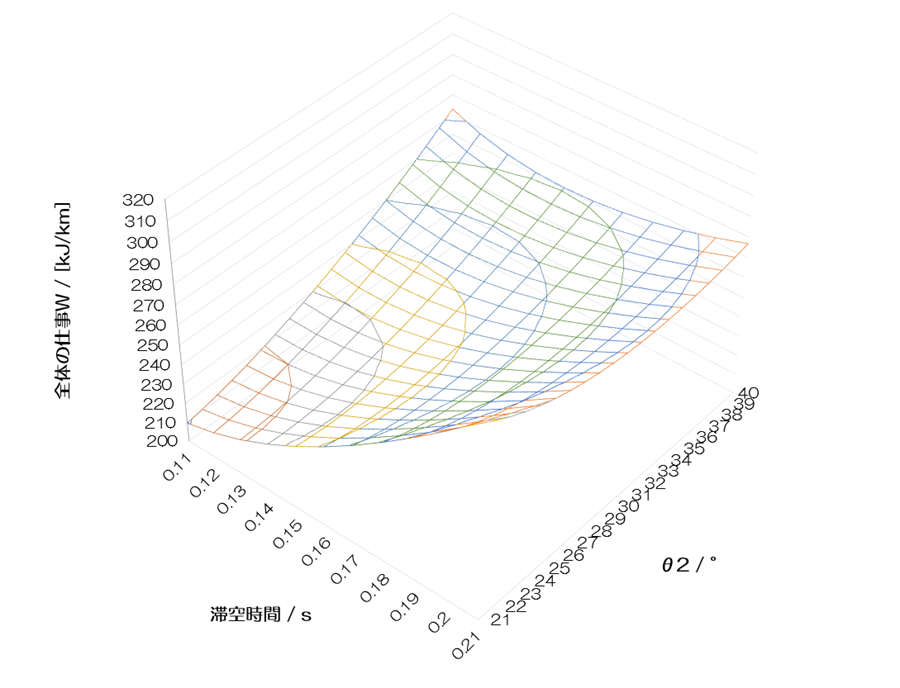
全体の仕事Wのグラフは特徴的です。大きく下向きに湾曲しています。今回見ている範囲においては、θ2を一定にして、滞空時間を変化させていくと極小値を取ることを意味しています。滞空時間一定でθ2を変化させたときはどうでしょうか。滞空時間0.11 sのときには、見ている範囲には極小値はなさそうです。ところが、滞空時間0.21 sのときには極小値がありそうです。
各速度における極小の全体の仕事Wminを求めてみた
ランニングの効率化とは、すなわち、所定の速度で走るための極小の全体の仕事Wminを見つけ出すことです。ここまでの検討では、θ2と滞空時間に対して、速度V、ストライド、ピッチ、全体の仕事Wの変化を見てみましたが、実際に見たいのは、速度Vと全体の仕事Wの関係です。その関係がこれまで明らかでなかったのは、θ2と滞空時間を変化させることにより、速度Vも変化し、全体の仕事Wも変化するためです。ところが、θ2と滞空時間の組み合わせには一定の自由度があるために、速度Vと全体の仕事Wの関係性を見出すことができなかったのです。つまり、速度Vを指定してあげても、全体の仕事Wはわからなかったのです。

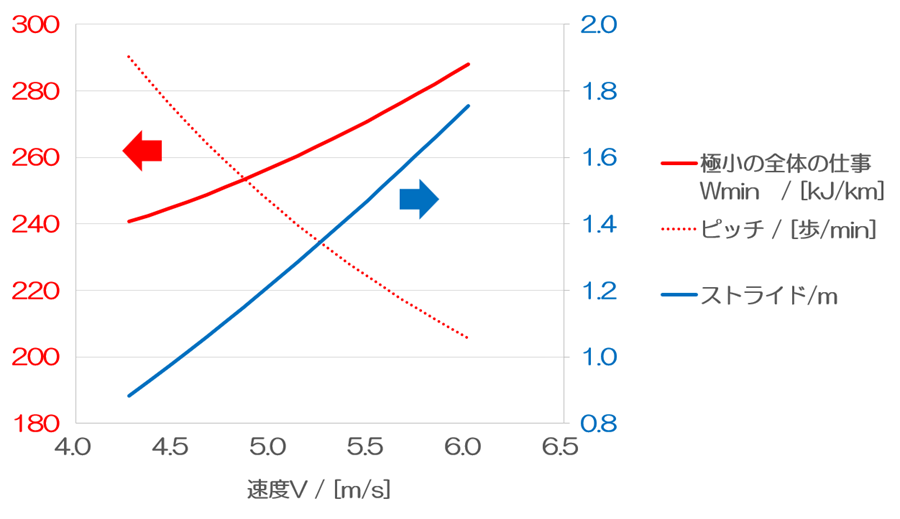
しかし、全体の仕事Wのグラフが可視化されたことで極小値を取ることがわかりました。私はランニングの最適化を追求していますから、興味があるのは、この極小値だけなのです。そこで、速度Vを変化させていき、各速度おける極小の全体の仕事Wmin(赤線)を求めてみました。速度Vは横軸で示されています。速度Vが増加するに従い、極小の全体の仕事Wminは増加しました。これは、理に適った結論です。わざわざ言われなくても誰もが知っていることです。重要なのは、これに伴い、ストライドとピッチがどのように変わってくるか、です。
すると、下のようなグラフになります。速度Vが増加するに従い、ストライドが大きくなり、ピッチが減少していくことがわかります。極小の全体の仕事Wminを示す、θ2と滞空時間の組み合わせにおいて、速度Vが増加して行くときは、ストライドが増加するものだと示されました。これは当然です。一方で、ストライドが増加する結果、ピッチは減少していきます。ピッチが減少することで、脚の入替にかかる仕事が減少するためです。ピッチが一定のまま、ストライドが増加するのではない、という点が私にとって意外な結果でした。
ただし、ストライドとピッチは意図的に変化させるものではなく、結果として変化するものです。意図的に変化させるのは、θ2と滞空時間になります。下のグラフを見てみると、速度Vを増加させるためには、θ2を増加させ、滞空時間も増加させるべきであるとわかります。重力ランニングの原則は、「接地中は加速することができるが、滞空中は減速するしかない」です。しかし、これを理解し、突き詰めたところで、出てきた結論が速度Vを増加させるときには、「θ2を大きくし、滞空時間を長くする」だったのです。
ただし、この命題が真であるのは、「極小の全体の仕事Wminを示す、θ2と滞空時間の組み合わせが実現されている」ときです。これを実現するのが第一歩であり、速度Vの増加は次の段階です。そこで、次は、速度Vを一定に値に固定した上で、θ2と滞空時間を変化させたときに、全体の仕事Wがどれくらい変化するのかを見てみます。