前方着地の否定をさらに否定する!低速への理論の拡張
着地は身体重心の直下が最適であることがわかりました。しかし、まだまだ解決するべき課題があります。その1つがウォーキングとランニングの統合です。
- 重力ランニングの理論へのウォーキングの統合のため、低速でのシミュレーションを行った。
- 3.0 m/s以上の速度では、身体重心のほぼ直下で着地するときに、仕事が最小値を示した。
- 2.9 m/s以下の低速では、身体重心よりも大きく前方に着地する方が仕事的に有利であることがわかった。
ウォーキングとランニングの区別
世の中にはランニング本の他にウォーキング本があります。ウォーキング本は必ず、ウォーキングに注目しており、それだけで完結しています。何故、ランニング本とウォーキング本は別なのでしょうか。
誰しも経験していると思うのですが、歩く速度を増加させていくと段々ときつくなります。一定の速度を上回ると走った方が楽だと思う点が訪れます。そうして、ランニングに切り替えるという動作を挟んで、ランニングに移行します。私もそうでした。
このように、ウォーキングとランニングは前進という目的は同じでも、別の動作であるから、最適なウォーキングと最適なランニングも別である。ゆえに、ランニング本とウォーキング本が別に存在する。私もそう思っていました。
ウォーキングの統合
私は重力ランニングの理論を構築してきました。その名の通り、ランニングに関する理論の一種です。しかし、その理論が最適なランニングに留まらず、最適なウォーキングを含めて説明することができるようにしたいと最初から考えていました。私の直感に過ぎませんが、二足歩行の理論が存在するとしたら、低速から高速まで連続的に最適値が存在するはずだと考えていました。逆の言い方をするなら、ランニングとウォーキングのいずれかだけを記述するものでは不十分だと考えています。
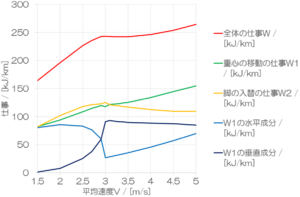
重力ランニングの理論によれば、静止状態からランニングまでの加速の過程において、ウォーキングからランニングへの切り替えは存在しません。私は今ではウォーキングから全速力まで連続的に加速していくことが可能です。このことから、前回行ったシミュレーションから出発して、徐々に速度を減少させて、ウォーキングを表現できるのかを検証しました。5.0 m/sから速度を減少させていく中で非常に興味深い発見がありました。
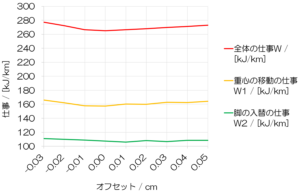
ランニング時の全体の仕事Wと着地位置のズレ(オフセット)との関係を示したグラフが上のグラフです。オフセットは着地位置が身体重心の直下であるときに0 mです。後方にずれたときは正の値、前方にずれたときは負の値と定義しています。
まず、5.0 m/s(茶色)を見てください。オフセットが0 mのときに最小値を示しています。つまり、前方にずれたときは全体の仕事Wが大きく増加し、後方にずれたときに緩やかに増加しています。そして、4.0 m/sでは前方と後方の全体の仕事Wの増加がほぼ対称になります。そして、3.5 m/sでは、後方の増加の方が大きくなります。つまり、前方へのズレの影響が小さくなり、後方へのズレの影響が大きくなっているのです。さらに別の言い方をすれば、速度が大きいときはランニング中に着地が前方にずれると非効率なのですが、速度が小さくなってくると後方にずれる方が非効率になるのです。
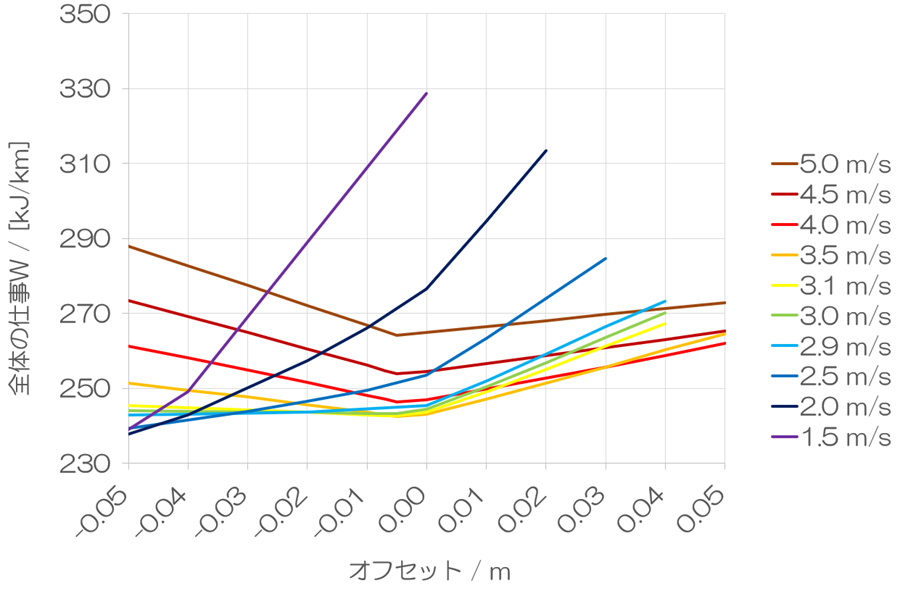
ランニングとウォーキングの境界線は?
そして、3.0 m/sと2.9 m/sの間において大きな変化が起こります。3.0 m/s以上の速度では、全体の仕事Wはオフセットが0 mか-0.005 m(-5 mm)のときに最小でした。ところが、2.9 m/s以下ではオフセットが最小値を示す地点が大きく前方にシフトするのです。これは大問題です。これをそのまま受け入れるのであれば、2.9 m/s以下の低速では、身体重心よりも前方で着地するべきであると言っているのです。2.9 m/sでは-0.08 m、2.5 m/sでは-0.18 m、2.0 m/sでは-0.24 m、1.5 m/sでは-0.26 mで全体の仕事Wが最小値を示しました。
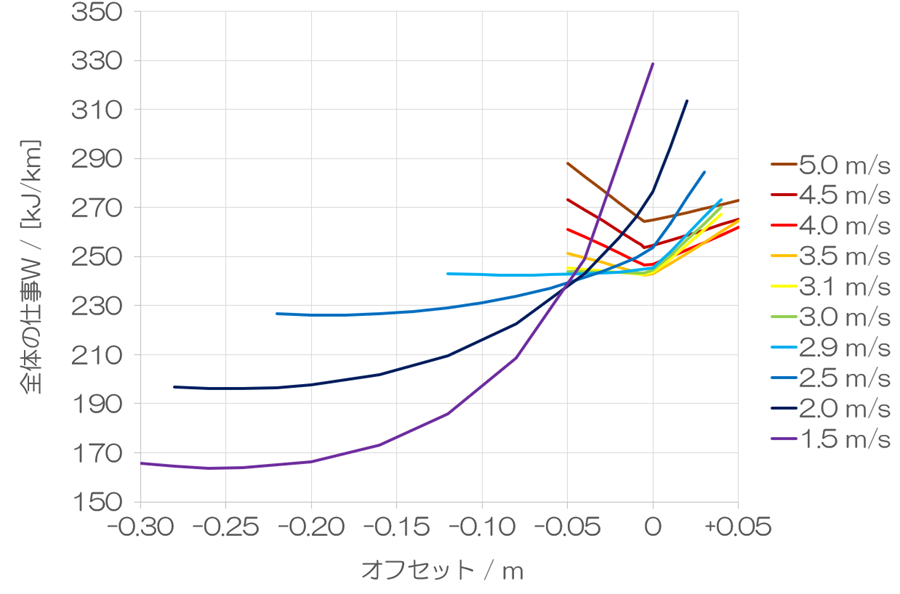
最小値が身体重心のほぼ直下で現れるか、それとも、前方で現れるかによりランニングとウォーキングを区別することはできるのかもしれません。しかし、その切り替わりは徐々に起こります。つまり、ウォーキングとランニングの中間状態は存在します。例えば、3.0 m/sにおいて全体の仕事Wは、オフセットが-0.005 mで最小値を示すものの、前方にずれた場合でも増加は非常に緩やかです。ということは、3.0 m/sではランニング(身体重心の直下に着地)とウォーキング(身体重心の前方に着地)は、仕事的にほとんど変わらないため、どちらも可能であるのです。実際、3.0 m/sは、180 m/minです。不動産物件の駅から何分という表示に使われるのは80 m/minです。180 m/minはその2.25倍ですので、ウォーキングとしてはかなりの速足です。
そこで、一般的に実現可能なウォーキングの速度ということで、1.5 m/s(90 m/min)を見てみましょう。すると、身体重心の直下での着地は、あり得ないほど仕事的に不利になります。最適点(-0.26 m)に比べて、2倍の仕事を必要とすることになっています。この結果を裏付けするように、ウォーキングにおいては、皆、足を身体重心よりも前方に着地させています。
このように、ウォーキングを重力ランニングの理論に統合することに成功しました。重力ランニングの理論は、ランニングの最適化だけでなく、ウォーキングの最適化をも包含しています。逆の言い方をすれば、最適なウォーキングとは、低速の重力ランニングなのです。