
世界初!歩くよりも走る方が楽な速度領域の存在を証明
今回は、1.5 m/sから5 m/sまでの速度において全体の仕事Wが最小化されるように、パラメータを最適化してみました。より具体的には、離地時の身体の傾きθ2と滞空時間とオフセットを調整していきました。
- 1.5 m/sから5 m/sまでの各速度において、最適なランニングをシミュレートしたところ、3.0 m/sから3.1 m/sの間でウォーキングからランニングに切り替わることが示された。
- ウォーキングにおいては身体重心の前方で着地し、接地時間が長いため、身体重心の上下動が小さい。ランニングにおいては、身体重心のほぼ直下で着地し、滞空時間が長いため、身体重心の上下動が大きい。
- 3.0 m/sのウォーキングと、3.5 m/sのランニングは、ほぼ同じ仕事量となった。つまり、3.0 m/sを超えたら、3.5 m/sまで加速した方が楽である。
仕事
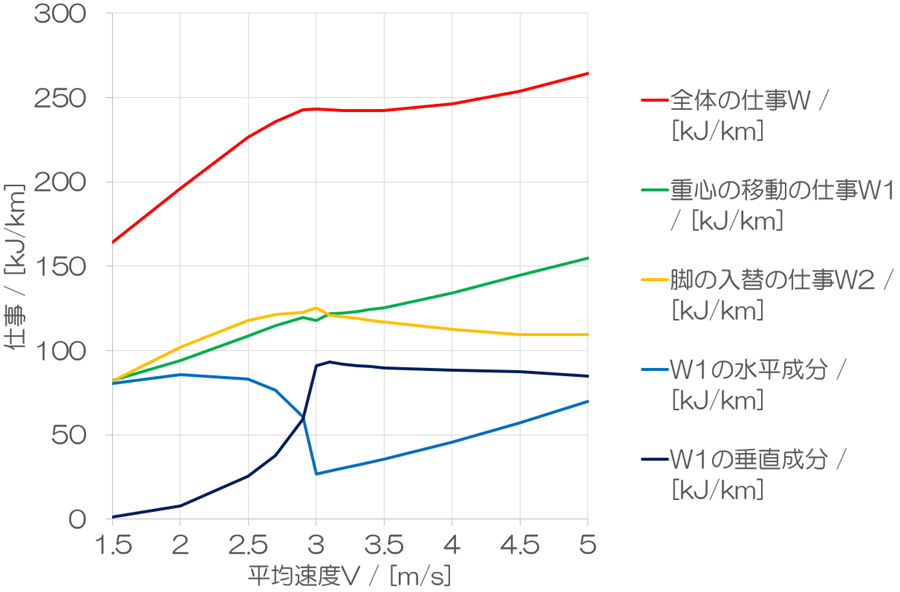
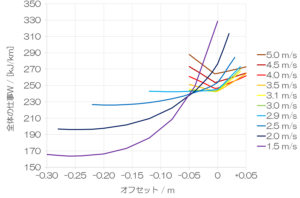
まずは、仕事から見ていきます。その中でも、全体の仕事Wが最も重要です。1.5 m/sから初めて、高速へ進んでいきます。1.5 m/sから3.0 m/sまではほぼ直線的に上昇していきます。しかし、3.1 m/sまでわずかに増加した後は減少に転じます。3.4 m/sで極小値を示した後は、単調増加に入ります。この間、重心の移動の仕事W1は増加している一方で、脚の入替の仕事W2は、3.0 m/sで最大値を示した後は減少に転じます。
非常に鮮やかな対照を見せたのが、W1の水平成分と垂直成分です。3.0 m/s以下の範囲にかけて、前者は劇的に減少し、後者は劇的に増加しました。3.0 m/sまでは重心の上下動が小さく、3.0 m/sからは大きくなるということです。2.9 m/sから3.0 m/sの範囲(以降、スイッチング領域)において、ウォーキングからランニングへの切り替わりを示しているのです。
スイッチング領域での変化は、私自身も予想しないものでした。この間で、シミュレーションの方法は変えていません。ただ平均速度Vに指定する値を順次変えていくだけで、このような変化が起こったのです。
オフセット
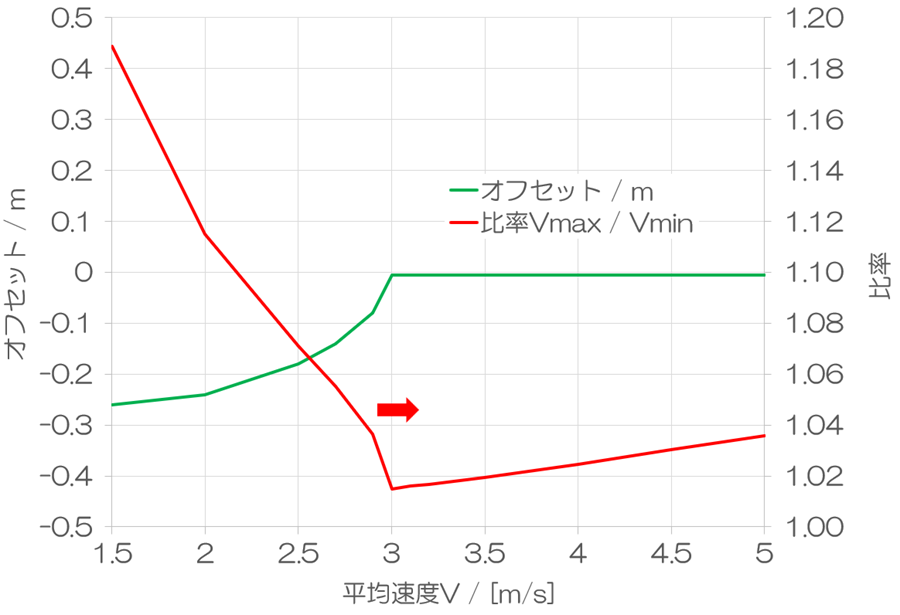
このようなスイッチング領域が、如何にして生じているかを最も良く説明できるのは、オフセットです。シミュレーションの結果は、実は私にとって意外なものでした。以前の記事で述べたように、ランニング中のオフセットは0 mが最適値であると思っていたのですが、スイッチング領域よりも低速においては、これが正しくなかったのです。オフセットの最適値は、大きく前方(負の値)となりました。重心よりも前方に着地をするということは、その瞬間にブレーキがかかるということです。速度の変動が大きくなることが予測されます。そこで、ランニング中の速度の最大値Vmaxと最小値Vminの比を求めてみました。やはり、オフセットが前方にズレる(負の値)ほど、ランニング中の速度の変動が大きいという結果となりました。オフセットの有無がウォーキングとランニングを分ける1つの明確な指標であることがわかりました。
脚の運び
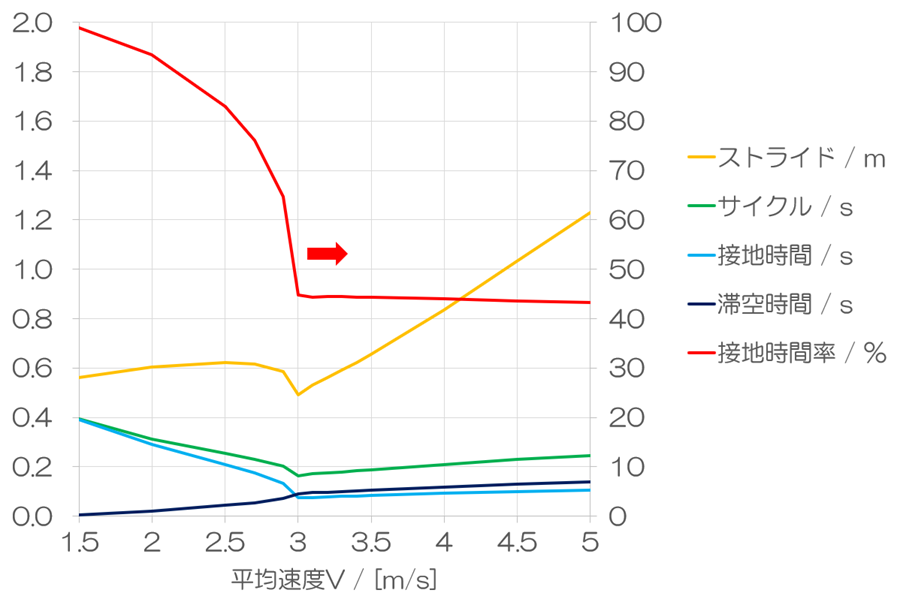
ストライドとピッチにも当然のように、不連続な変化が見られました。例によって、グラフ作成の都合で、ピッチではなく、サイクルを表示してあります。注目するべきは接地時間率です。1サイクルにおける滞空していない時間の割合です。1.5 m/sにおいては接地時間率が99%となりました。事実上、常にどちらかの足が接地していると言って良いでしょう。すなわち、一般的な観念におけるウォーキングになっていることがわかります。繰り返しになりますが、シミュレーションの方法を変えたわけではありません。1.5 m/sという低速においては、(もはや、滞空を伴うランニングではなく)ウォーキングが最も全体の仕事Wが小さい前進動作であるという結論が物理的な結論として導き出されたのです。速度が増加するにつれて、接地時間率は低下していきます。2.0 m/sでは93%になります。オリンピック競技における競歩の定義は、「常にどちらかの足が地面に接していることと、前脚が地面に接触した瞬間に膝が伸びていること」ですが、その定義に照らすと、7%が滞空時間だとするならば、人間の審判の目視でも失格と判定されるかも知れません。しかし、この物理的議論においては、スイッチング領域までがウォーキングであると考えます。グラフをご覧いただくとわかる通り、3.0 m/sにおいて接地時間率が45%まで劇的に減少した後は、5 m/sまでほぼ変化がないのです。この明確な変化点があることを踏まえると、スイッチング領域以前(3.0 m/s以下)はウォーキングであると考えるのは妥当です。
この接地時間率の変化が起こるのは、接地時間と滞空時間に大きな変化があるからです。接地時間は、スイッチング領域までは緩やかに減少し、スイッチング領域で、滞空時間を上回ります。一方で、滞空時間はまるで逆の傾向を示します。これら2つを加味すると、スイッチング領域以前は接地時間の長い前進動作であるウォーキング、以降は滞空時間の長い前進動作であるランニングであるということがさらに明確になります。
ストライドもかなり特徴的な変化を示しました。1.5 m/sから2.7 m/sまでは緩やかに増加しました。なるほど、歩幅を大きくすることで、速度が上がるのは納得できます。同時にサイクルも短くなります。ところが、2.7 m/sからスイッチング領域にかけてストライドが減少しました。その後は、速度増加と共にストライドが単調に増加していきます。増加→減少→増加という変化です。ウォーキングの中で見れば、速度が増加するとストライドが増加する。そしてまた、ランニングの中で見れば、速度が増加するとストライドが増加する。しかし、ウォーキングからランニングへの遷移の中では、ストライドは減少するのです。
重心の高さ
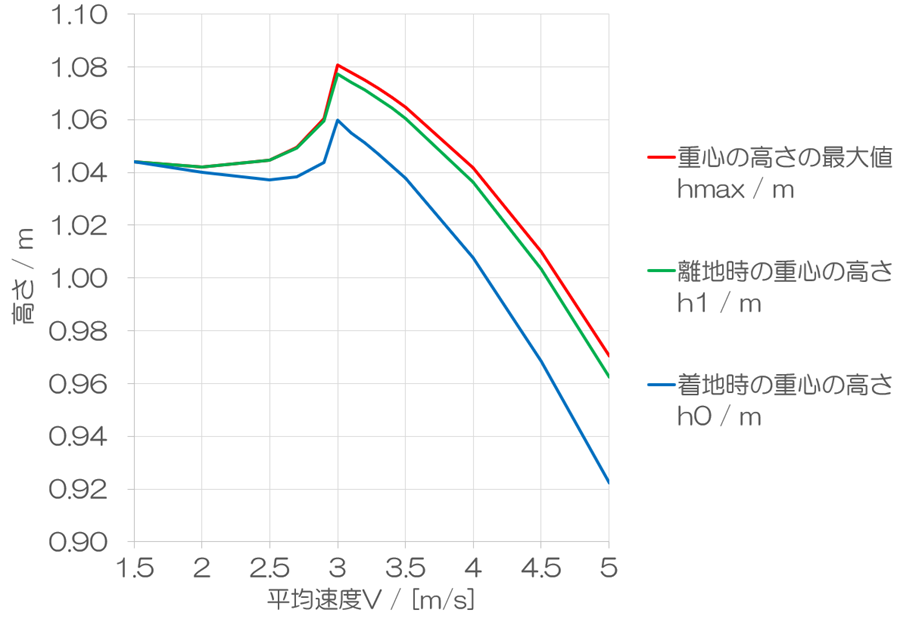
重心の高さもスイッチング領域の前後で全く異なる傾向を示しました。スイッチング領域以前では、重心の高さの変動がそもそも微小で、1.04 m付近で推移しました。2.6 m/sからスイッチング領域において、一旦、重心の高さの最大値と着地時の高さの両方が上昇しました。これはストライドが小さくなったことと、滞空時間が長くなったことに起因します。脚を前後に開く幅が小さくなり、かつ、離地して上昇する動作が発生したので、重心の位置が高くなったのです。その後は、速度を増加させるために、ストライドが大きくなりますので、重心はより低い範囲で運用されるようになります。着地時の重心の高さと重心の高さの最大値の差は大きくなります。滞空時間が長くなるためです。
まとめ
今回の検討により、誰もが何となく知っているけど説明できなかった事実を、世界で初めて物理的に証明することができました。それは、速く歩くよりゆっくり走った方が楽という速度領域がある、ということです。結論から述べると、およそ3 m/sを超えるとその速度で歩くよりも、3.5 m/sで走る方が楽になるのです。
※本記事においてはスイッチング領域は2.9 m/sと3.0 m/sの間を指しています。しかし、シミュレーションに用いる数字によって、スイッチング領域となる速度は変化します。ゆえに、現実の世界において、スイッチング領域の存在を予言する結果ではありますが、定量的に2.9 m/sと3.0 m/sの間に存在することを意味しているわけではありません。身体重心と接地点の上限値H:1.1 m
体重:60 ㎏
片脚の質量:10 ㎏
| 平均速度Vmax / [m/s] | 5.0 | 4.5 | 4.0 | 3.5 | 3.4 | 3.3 | 3.2 | 3.1 | 3.0 | 2.9 | 2.7 | 2.5 | 2.0 | 1.5 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 離地時の身体の傾きθ2 / ° | 28.6 | 23.8 | 19.2 | 15.0 | 14.3 | 13.5 | 12.8 | 12.1 | 11.3 | 15.6 | 17.2 | 17.6 | 17.1 | 15.7 |
| 滞空時間 / s | 0.139 | 0.129 | 0.117 | 0.104 | 0.102 | 0.100 | 0.097 | 0.095 | 0.091 | 0.071 | 0.055 | 0.043 | 0.020 | 0.004 |
| オフセット / cm | -0.005 | -0.005 | -0.005 | -0.005 | -0.005 | -0.005 | -0.005 | -0.005 | -0.005 | -0.08 | -0.14 | -0.18 | -0.24 | -0.26 |
| ストライド / m | 1.23 | 1.03 | 0.83 | 0.65 | 0.62 | 0.59 | 0.56 | 0.53 | 0.49 | 0.58 | 0.62 | 0.62 | 0.60 | 0.56 |
| ピッチ / [歩/min] | 244 | 262 | 288 | 321 | 328 | 335 | 343 | 350 | 366 | 297 | 261 | 238 | 193 | 152 |
| 接地時間 / s | 0.106 | 0.100 | 0.092 | 0.083 | 0.081 | 0.079 | 0.078 | 0.076 | 0.074 | 0.131 | 0.175 | 0.210 | 0.291 | 0.391 |
| 接地時間率 / % | 43 | 44 | 44 | 44 | 44 | 44 | 44 | 44 | 45 | 65 | 76 | 83 | 93 | 99 |
| 着地時の重心の高さh0 / m | 0.92 | 0.97 | 1.01 | 1.04 | 1.04 | 1.05 | 1.05 | 1.05 | 1.06 | 1.04 | 1.04 | 1.04 | 1.04 | 1.04 |
| 離地時の重心の高さh1 / m | 0.96 | 1.00 | 1.04 | 1.06 | 1.06 | 1.07 | 1.07 | 1.07 | 1.08 | 1.06 | 1.05 | 1.04 | 1.04 | 1.04 |
| 重心の高さの最大値hmax / m | 0.97 | 1.01 | 1.04 | 1.06 | 1.07 | 1.07 | 1.07 | 1.08 | 1.08 | 1.06 | 1.05 | 1.04 | 1.04 | 1.04 |
| 速度の最大値Vmax / [m/s] | 5.11 | 4.58 | 4.06 | 3.54 | 3.44 | 3.33 | 3.23 | 3.13 | 3.03 | 2.95 | 2.76 | 2.57 | 2.08 | 1.58 |
| 速度の最小値Vmin / [m/s] | 4.93 | 4.45 | 3.96 | 3.47 | 3.37 | 3.28 | 3.18 | 3.08 | 2.98 | 2.84 | 2.61 | 2.39 | 1.86 | 1.33 |
| 比率Vmax / Vmin | 1.03 | 1.03 | 1.03 | 1.03 | 1.03 | 1.03 | 1.03 | 1.03 | 1.03 | 1.03 | 1.03 | 1.03 | 1.03 | 1.03 |
| 重心の移動の仕事W1 / [kJ/km] | 155 | 144 | 134 | 125 | 124 | 123 | 122 | 122 | 118 | 120 | 115 | 109 | 94 | 82 |
| W1の水平成分 / [kJ/km] | 86 | 59 | 38 | 23 | 21 | 19 | 17 | 15 | 13 | 35 | 47 | 52 | 52 | 45 |
| W1の垂直成分 / [kJ/km] | 104 | 90 | 74 | 59 | 56 | 54 | 51 | 50 | 45 | 35 | 23 | 16 | 5 | 1 |
| 脚の入替の仕事W2 / [kJ/km] | 109 | 109 | 112 | 117 | 118 | 119 | 120 | 121 | 125 | 123 | 121 | 118 | 102 | 82 |
| 全体の仕事W / [kJ/km] | 264 | 254 | 246 | 242 | 242 | 242 | 242 | 243 | 243 | 242 | 236 | 226 | 196 | 164 |
“世界初!歩くよりも走る方が楽な速度領域の存在を証明” に対して1件のコメントがあります。